
Polish ML Community in Poznań - Presentation about Drone Localisation without GNSS
How to fly a drone to a destination without GPS (most of the time) using machine learning?
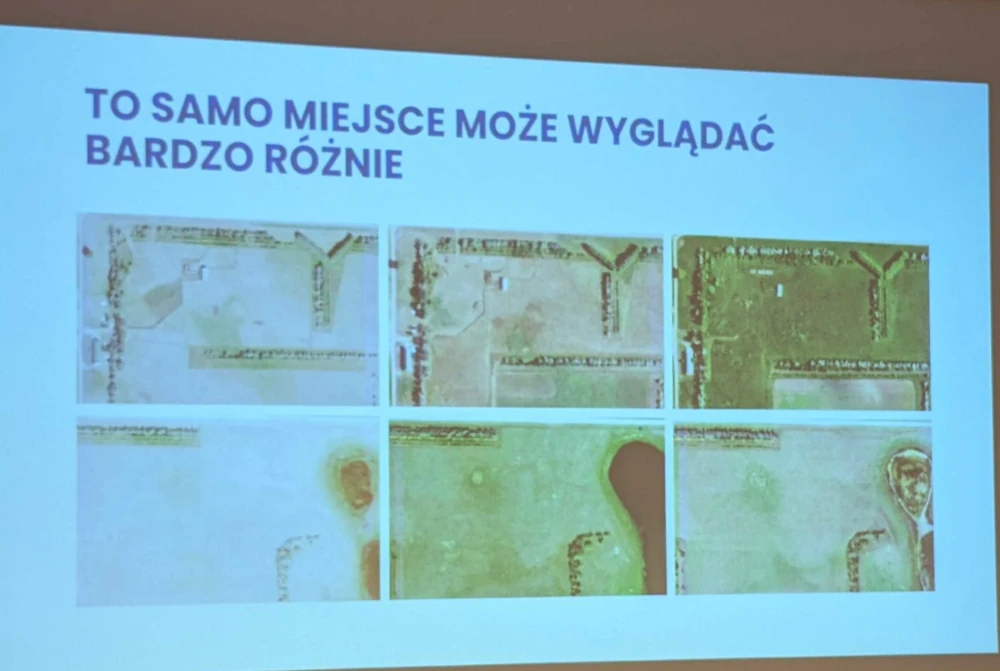
Marek Kraft had the pleasure of presenting at the Polish ML Community event in Poznań, where he discussed methods for drone localisation without relying on GNSS. His presentation focused on utilising a camera and an environmental map to determine the drone’s position. The approach involved leveraging a particle filter to estimate location, with the evaluation based on a variety of metrics, including simple correlation, a combination of texture and colour features, and neural network-based metric learning to generate embeddings.
The audience received the presentation warmly, and the ensuing discussion sparked a lively exchange of ideas on advanced localisation techniques.


Comments